The Synthesis of Unpaired Underwater Images for Monocular Underwater Depth Prediction
Abstract
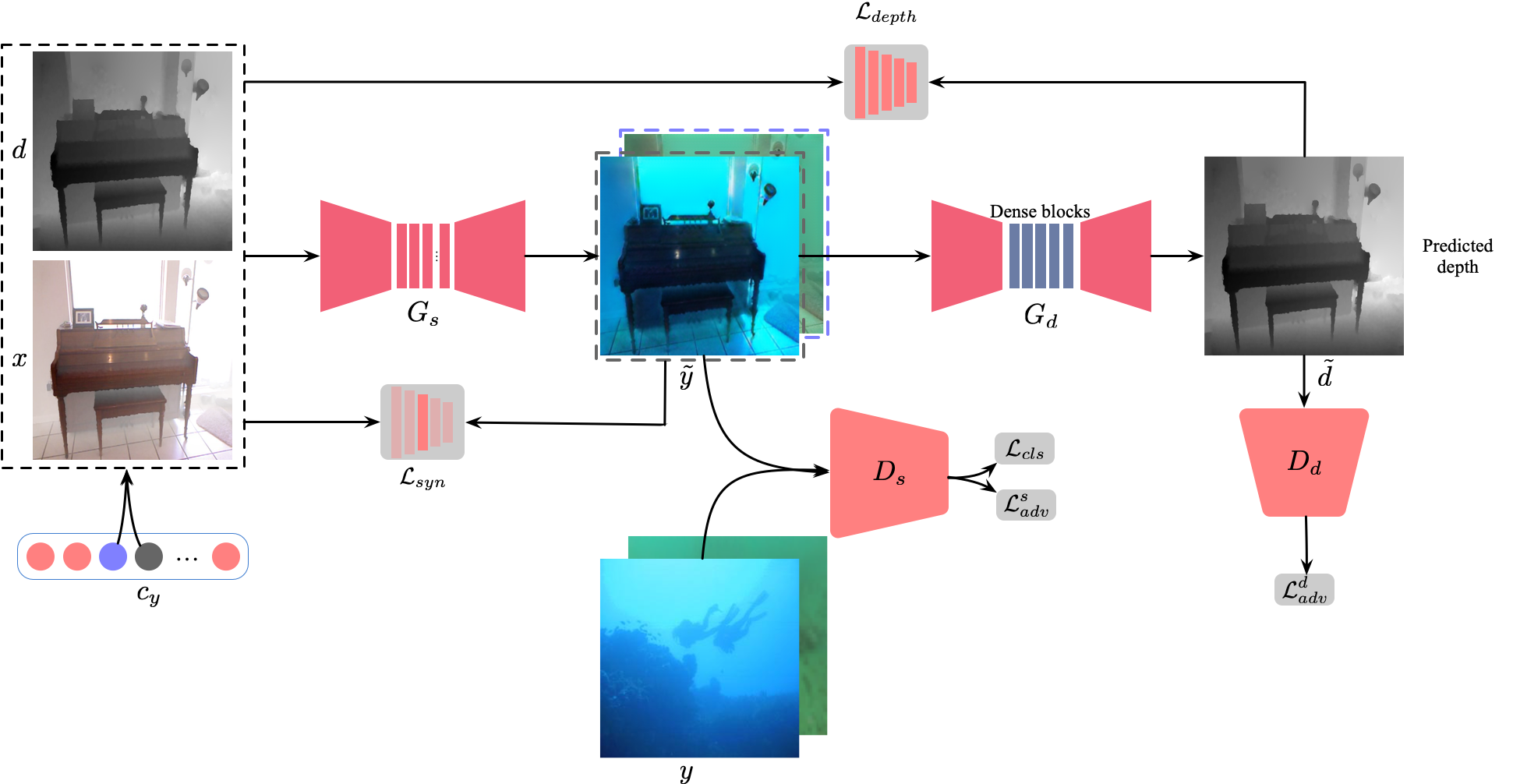
Underwater depth prediction plays an important role in underwater vision research. Because of the complex underwater environment, it is extremely difficult and expensive to obtain underwater datasets with reliable depth annotation. Thus, underwater depth map estimation with a data-driven manner is still a challenging task. To tackle this problem, we propose an end-to-end system including two different modules for underwater image synthesis and underwater depth map estimation, respectively. The former module aims to translate the hazy in-air RGB-D images to multi-style realistic synthetic underwater images while retaining the objects and the structural information of the input images. Then we construct a semi-real RGB-D underwater dataset using the synthesized underwater images and the original corresponding depth maps. We conduct supervised learning to perform depth estimation through the pseudo paired underwater RGB-D images. Comprehensive experiments have demonstrated that the proposed method can generate multiple realistic underwater images with high fidelity, which can be applied to enhance the performance of monocular underwater image depth estimation. Furthermore, the trained depth estimation model can be applied to real underwater image depth map estimation.
Architecture
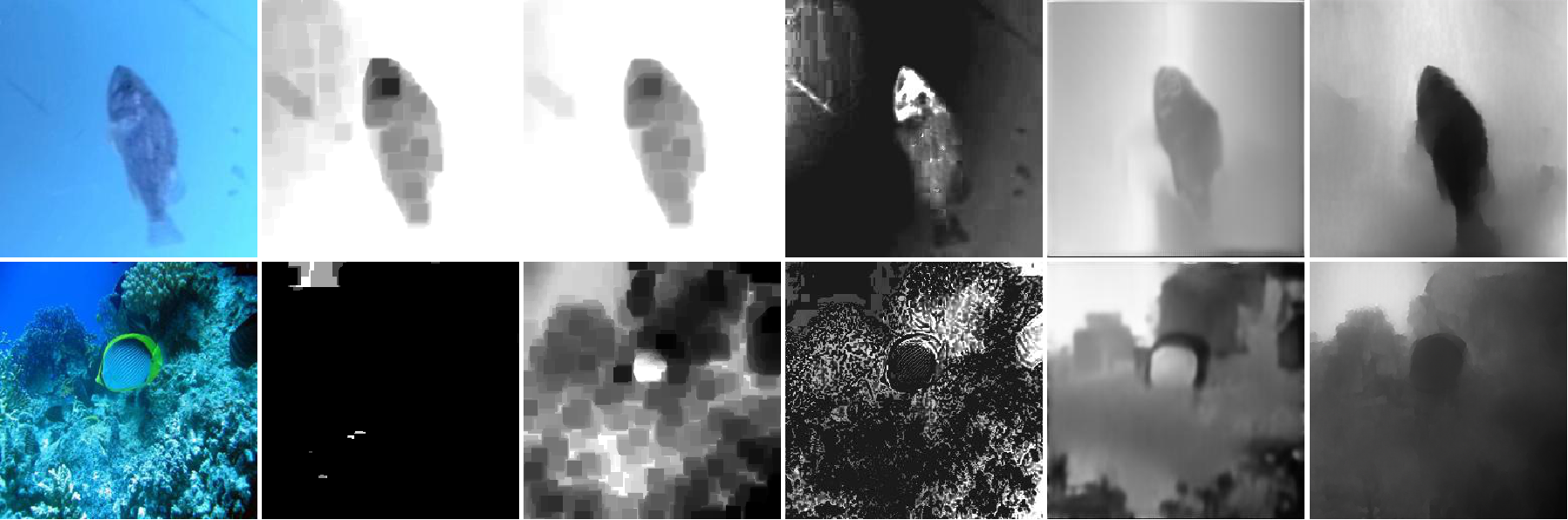
Results

Citation
@article{zhao2021synthesis,
title={The Synthesis of Unpaired Underwater Images for Monocular Underwater Depth Prediction},
author={Zhao, Qi and Zheng, Ziqiang and Zeng, Huimin and Yu, Zhibin and Zheng, Haiyong and Zheng, Bing},
journal={Frontiers in Marine Science},
pages={1305},
year={2021},
publisher={Frontiers}
}